3줄 요약
- psychedelic-maid-v2 헤더의 자세 모호함을 정정하려 11라운드의 도구 시도, 그리고 모델로 자세를 선화 추출하는 시도까지 모두 실패한 끝에, 사용자가 v9 컬러 컷을 베이스로 손그림 가이드를 직접 통합해 마무리한 카드다.
- 모델은 시각 단서가 모호한 영역에서 가장 안전한 해석(낮은 엔트로피)으로 회귀한다. 치마 안의 다리·허리 트위스트처럼 명료한 단서가 없으면 매번 정면 차렷 + 차분한 자세로 떨어졌고, 손그림 가이드를 input으로 넣어도 자세를 옮기지 못했다.
- 결정적 발견은 AI는 출발점이고 인간이 마무리한다는 것. v9이라는 반쯤 맞는 출발점과 사용자의 손그림이 결합되어야 비로소 자세가 자리잡았다. 매끈한 자동화 파이프라인의 끝에는 결국 손그림을 들어 직접 마무리하는 결정이 있었다.
의도와 시드
psychedelic-maid-v2 헤더는 익스트림 로우앵글 + 허리 트위스트 + 한 다리 들어올림의 다이내믹 자세를 의도한 컷이었다. 그러나 의상·리본·머리카락이 다리 영역을 덮어 자세의 골격이 모호해진 결이 남았다 — 받침 다리가 어디 있는지 한눈에 안 보이고, 허리 트위스트의 강도도 흐릿했다. 이를 명료한 발레/니킥 자세로 정정한 후속 컷을 만들고자 했다.
시드: v2 cover, D 정면샷(의상 정본), 작업 도중 만들어진 자세 가이드.
1단계 · 자세 환원 분석
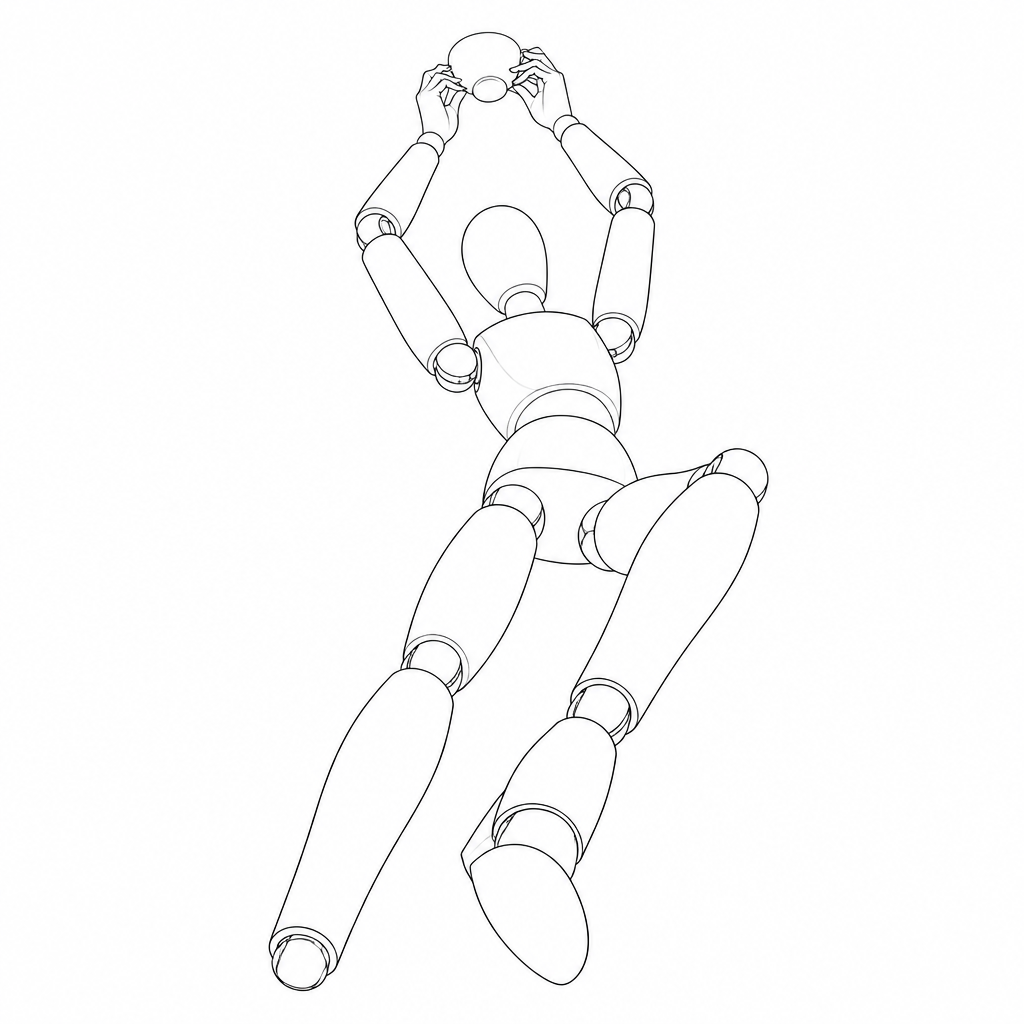
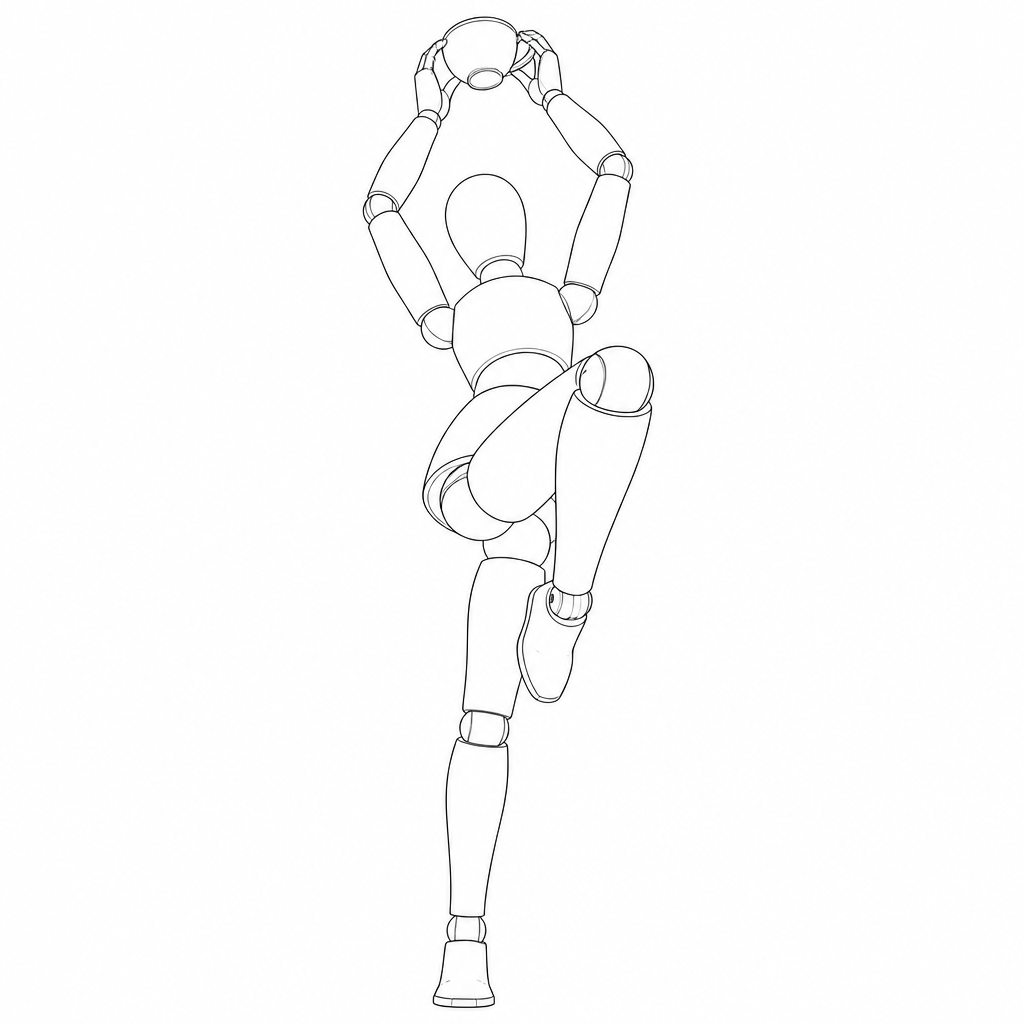
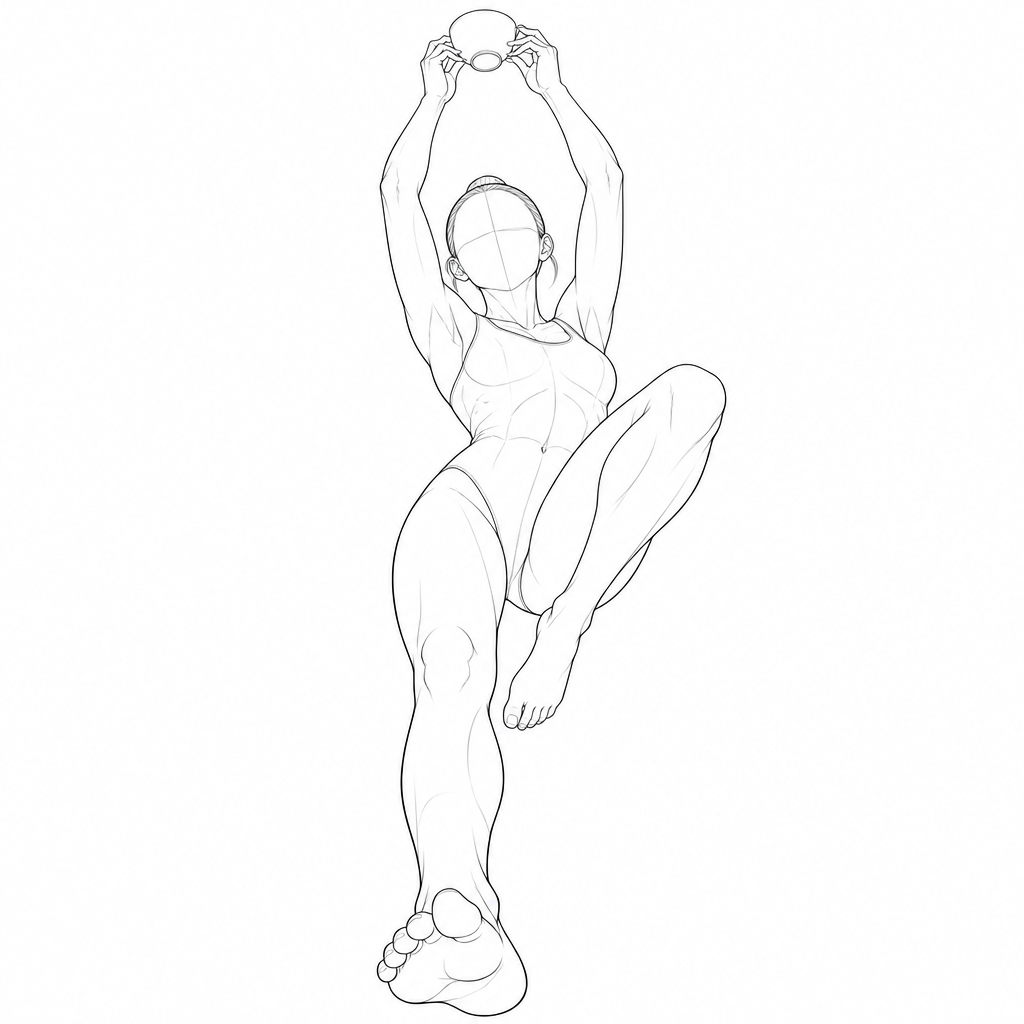
목각 인형 선화로 v2의 자세를 환원하려 했더니 모델이 두 다리가 접힌 누운 자세로 잘못 해석했다. 의상·리본이 다리 영역을 가려 시각 단서가 모호했기 때문. prompt에 자세를 명시하고 v2 cover를 input으로 함께 넣어 서 있는 한 다리 지지 + 한 다리 들어올림까지 정합된 환원본에 도달했다.

2단계 · 의상으로 재생성 (v3)
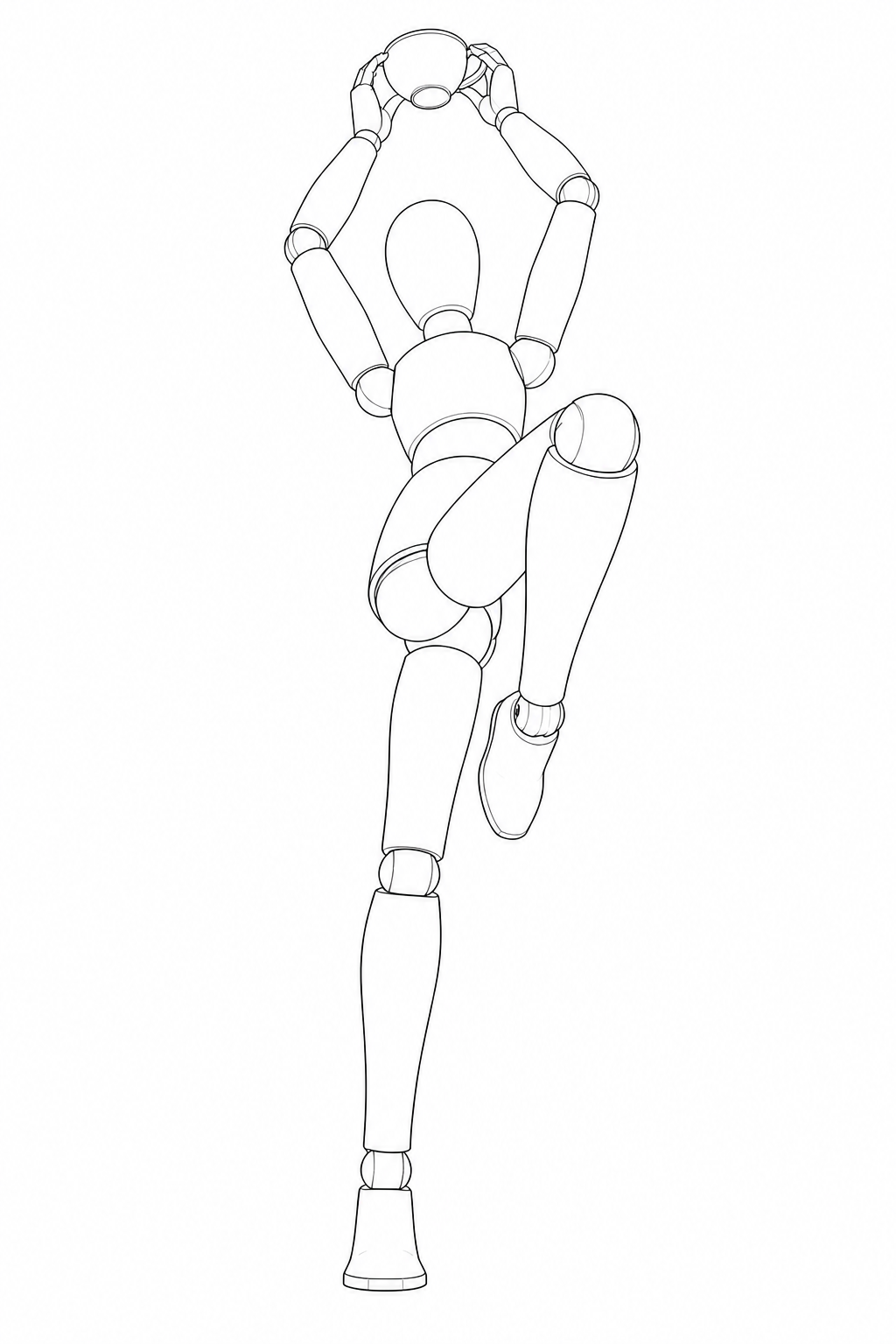
원본 + D 정면샷(의상 디테일) + 목각 mannequin(다리 골격) 세 input의 책임 분리로 컬러 컷을 재생성. 들어올린 다리는 또렷이 잡혔지만 받침 다리가 통째로 누락됐다 — 치마 자락 안에 다리의 존재 자체가 비어 있는 결.

3단계 · Body Line 진단
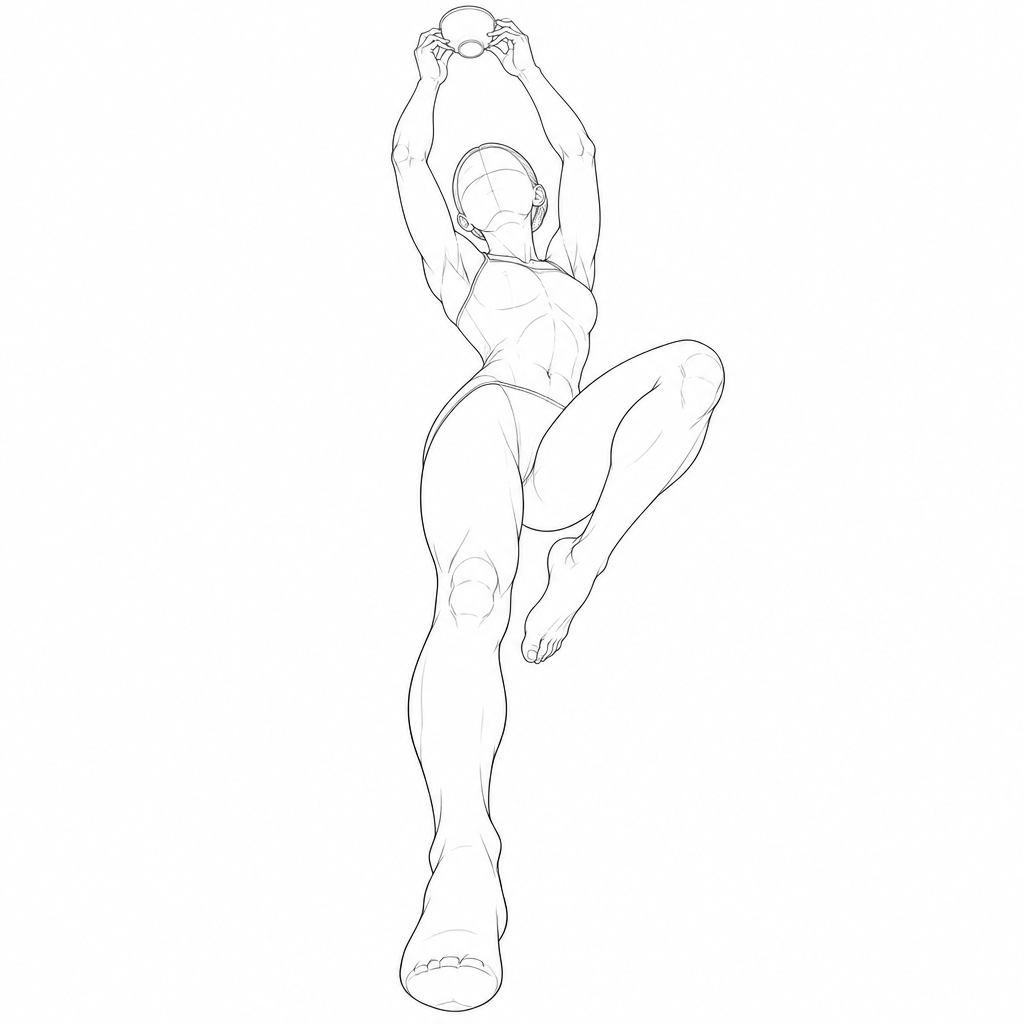
의상으로 그릴 때만 다리가 빠지는 현상을 진단하려 인체 선화로 환원했다. 결과는 의외였다 — 인체로 그리라고 하면 모델은 다리를 빠뜨리지 않는다. 즉 다리 누락은 자세 해석의 실패가 아니라 의상의 그래픽적 단순화 압력에서 비롯된다. 치마 자락 안은 모델에게 그릴 의무가 없는 영역.
4단계 · 처방 라운드들 (v6 – v11)
진단을 토대로 처방을 굴렸다. 매 라운드마다 다른 결로 실패했다.
- v6 (과처방): 가이드 input을 함께 넣으니 자세 전체가 가이드 결로 끌려갔다. 들어올린 다리 위치까지 바뀜.
- v9 (치마 길이 정정): 받침 다리에 양말을 입히려다 치마가 짧아져 v3 치마 길이를 정본으로 다시 잡음. 자세는 여전히 약함.
- v10 (허리 트위스트 명시): 결과는 정면 차렷 + 두 다리 V자 벌림. 모델이 허리 트위스트를 무시하고 가장 안전한 정면 자세로 떨어졌다.
- v11 (무에타이 니킥 비유): 비유로 prompt를 강화했지만 자세의 정확도는 여전히 부족.




5단계 · 우회 시도들, 그리고 v9 위에 손으로 덧그림
11라운드의 도구 시도가 자세를 끝내 못 잡자 우회 경로를 시도했다.
자세 선화 추출 시도 — gpt-image-2는 컬러 일러스트에서 자세 자체를 못 이해했다. 그러면 자세를 선화로 추출해 모델의 부담을 줄이면 어떨까. 그러나 모델은 선화로 추출하는 작업조차 자세를 정확히 옮기지 못했다. 빨간 선화는 그 시도의 실패작.
선화 위에 옷을 합성 시도 — 자세 선화가 약하게라도 잡혔다면 그 위에 메이드 의상을 합성하면 되지 않을까. 흑백 선화에는 자세 + 의상이 함께 들어갔지만 그래픽 톤이 v9 수준으로 올라오지 못했고, 자세·의상의 정합도 어그러졌다. 이마저도 실패.

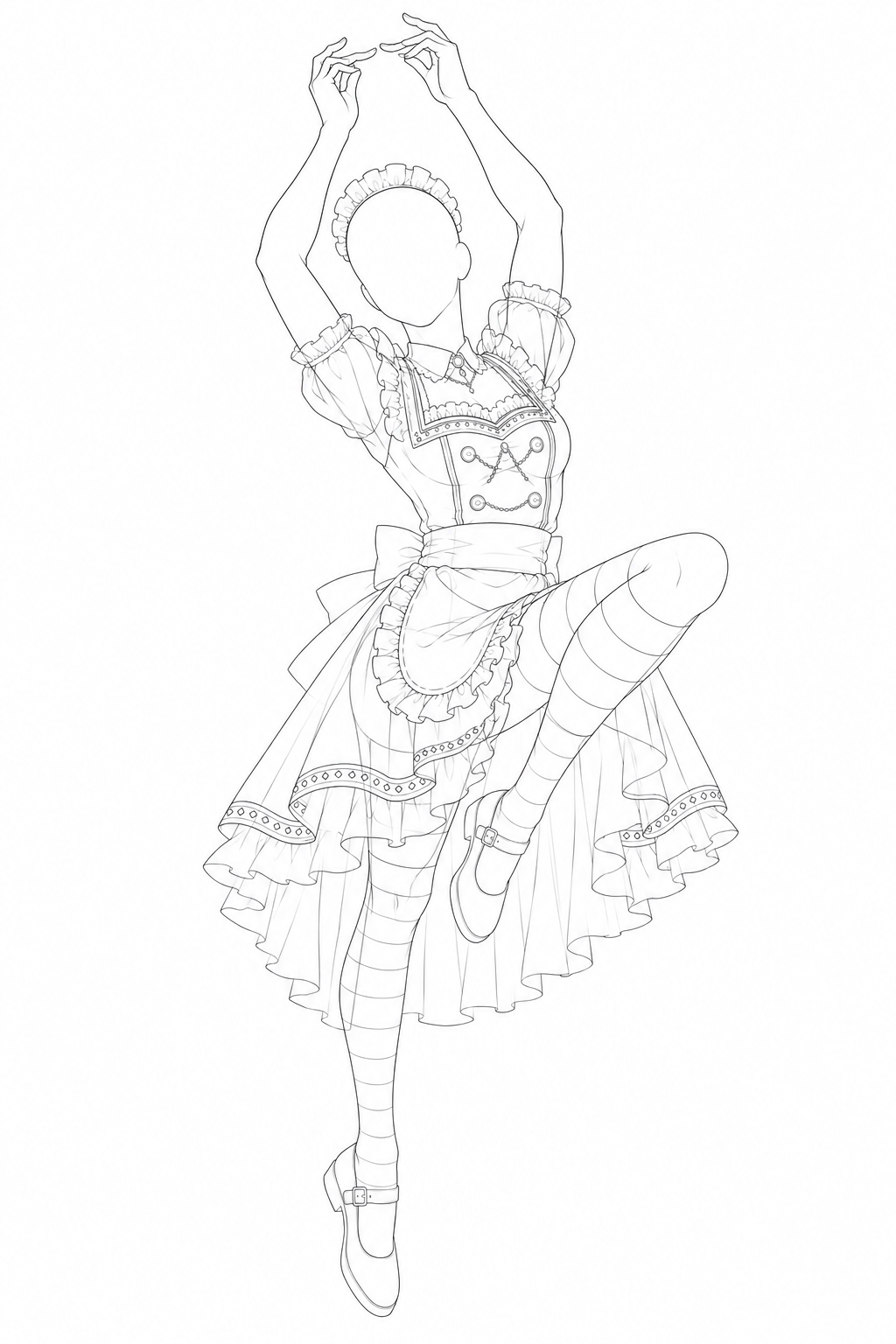
v9 위에 손그림으로 덧그림 — 마지막 길. 모든 우회가 막힌 끝에 남은 길은 하나였다. 11라운드 중 그래픽 톤이 가장 자연스러웠던 v9 컬러 컷을 베이스로 사용자가 직접 손그림으로 자세 디테일을 덧그려 완성. 매끈한 자동화 파이프라인의 끝에는 사용자의 손이 직접 잡은 자세가 있었고, 그것이 이 카드의 cover다.

가장 흥미로운 지점
모호함 → 안전한 해석. 모델은 시각 단서가 모호한 영역에서 가장 낮은 엔트로피의 해석으로 떨어진다. 치마 안의 다리나 허리 트위스트처럼 명료한 단서가 없는 자세 차원에서는 항상 정면 차렷 + 차분한 자세로 회귀했다. 매 라운드마다 내가 명시하지 않은 차원을 모델이 잘못 채워 넣었다.
비유의 한계. 무에타이 니킥, 발레 en pointe 같은 비유를 prompt에 넣어도 모델은 비유의 전체 골격을 적용하지 않고 부분만 차용한 채 다른 차원은 또 안전한 해석으로 채운다. 비유는 시작점이지 정본이 아니다.
우회로도 막힌다. 자세를 못 옮긴다면 선화로 추출해 부담을 덜자, 추출된 선화 위에 옷을 합성하자 — 이런 우회 시도들도 모두 실패했다. 모델이 자세를 못 이해하는 영역은 정공법이든 우회로든 통과되지 않는다. 도구의 한계는 우회로로 넘는 게 아니라 도구 바깥으로 넘는다.
AI는 출발점이고 인간이 마무리한다. 11라운드의 도구 시도와 두 가지 우회 시도가 모두 실패한 끝에 남은 길은 v9 컬러 컷을 베이스로 손으로 직접 덧그리는 것이었다. AI가 만든 그래픽 톤이 좋은 출발점과 인간의 손그림 마무리가 결합되어야 비로소 자세가 자리잡았다. 완성도는 자동화로 끝까지 가지 않는다.
카드의 정수. 이 카드의 cover는 완벽한 컬러 정본이 아니라 AI 출발점 + 인간 손그림 마무리의 결합이다. 11라운드의 도구 시도와 우회 시도들은 그 결합이 필요한 이유를 검증해준 발판이다.
출처
자체 설계 — Jubok Kim의 손그림 마무리 협업.
메모
- 베이스 카드: psychedelic-maid-v2
- 정합 라운드 R2 prefix:
pages/pose-study-mannequin/(페이지 작업 흐름에서 누적, 본문에서 그대로 참조) - 정본 cover · 사용자 손그림 R2 prefix:
gallery/psychedelic-maid-v3/ - 발행 모드: making-of — 라운드 시안을 본문에 figure 그리드로 노출
- 11라운드 도구 시도 + 자세 선화 추출 시도 + 선화 위 의상 합성 시도가 모두 실패. 마지막엔 사용자가 v9 컬러 컷을 베이스로 직접 손그림으로 덧그려 자세 디테일을 잡고 컬러 일러스트로 마무리.